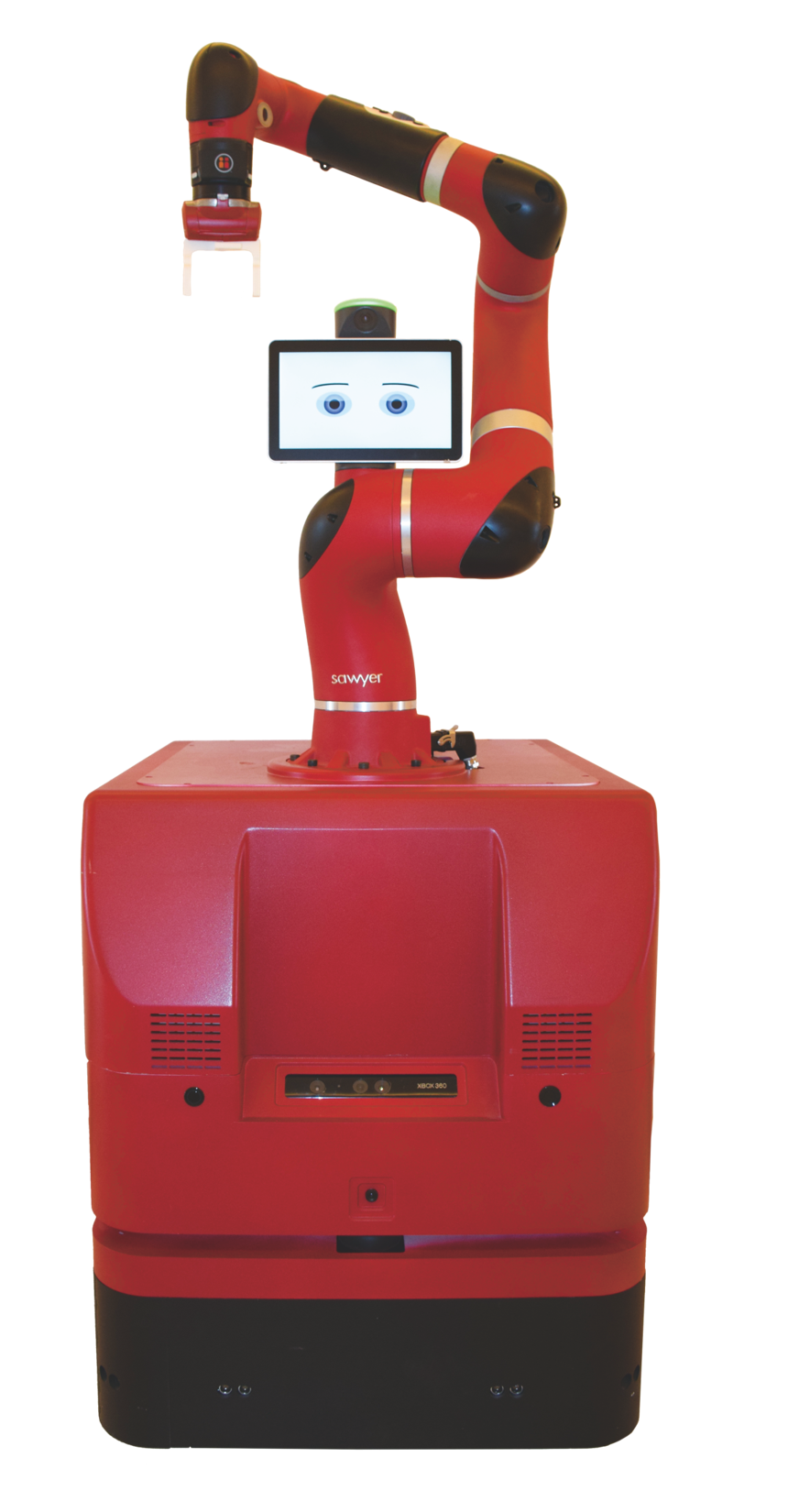
智能移动底盘Ant-B/S
特点:具有四驱系统,可全向移动,激光导引和磁条导引方式可选,可选配Kinect、视觉监控等功能器件,多传感器融合,开源ROS系统,适用于科研教学。

外观尺寸
L900×W680×H540/845(mm)
导航方式
激光导航/磁条导引(可选)
移动方式
全向移动
通讯功能
无线通讯、RS485
驱动方式
四轮四驱
转弯半径
最小可达0mm
行走速度
≤45m/min
越障能力
≤15mm
负载能力
200Kg
适配机械臂
适配Baxter、Sawyer、TM系列机器人
安全防护
激光防撞、超声防撞
充电方式
手动
能源系统
24V DC 58Ah
续航能力
3h(搭载机器人)
高级功能
预装ROS系统、激光SLAM开源导航包、视觉跟随、前置摄像头视觉节点包
智能移动底盘Ant-X
特点:具有四驱系统,可全向移动,激光SLAM导航,双模路径规划、可选配双目视觉、视觉监控等功能器件;工控和ROS双系统开放程度高,可应用于柔性生产线同时也适用于科研教学平台。

|
外观尺寸 |
L850×W570×H580(mm) |
导航方式 |
激光SLAM导航 |
|
移动方式 |
全向移动 |
通讯接口/功能 |
RJ45、RS485&TCP/IP |
|
驱动方式 |
四轮四驱 |
转弯半径 |
最小可达0mm |
|
行走速度 |
≤45m/min |
越障能力 |
≤15mm |
|
负载能力 |
200Kg |
适配机械臂 |
适配任意机器人 |
|
导航精度 |
±25mm |
安全防护 |
激光防撞、超声防撞、机械防撞 |
|
充电方式 |
手动 |
能源系统 |
24V DC 40Ah |
|
续航能力 |
3h(搭载机器人) |
高级功能 |
自带路由器,web端连线控制,双模slam规划 |
工业级AGV
特点: 具有四轮四驱或四轮两驱系统,磁条导引,激光障碍识别。工业级工控系统,简洁明快的控制需求界面,轻松设置站点信息(运动方向、速度、到站启停等待、升级销升降、站点通讯交互、充电等)


|
外观尺寸 |
L1340×W620×H245(mm) 可定制 |
导航方式 |
磁条导引 |
|
移动方式 |
全向移动 |
通讯功能 |
Zigbee无线通讯,支持modbus RTU |
|
驱动方式 |
四轮四驱 |
转弯半径 |
<1000mm |
|
行走速度 |
<40m/min |
爬坡能力 |
≤5°斜坡 |
|
负载能力 |
200kg/500Kg |
导航精度 |
±15mm |
|
安全防护 |
激光防撞/超声防撞/机械防撞 |
充电方式 |
自动/手动 |
|
能源系统 |
24V DC 50Ah |
续航能力 |
8h、在线充电 |
|
应用场合 |
承载转运、货架拖拽等 |
|
|
多模态感知复合机器人
协作型柔性臂:仿生型机械臂,单臂7自由度、关节内置力传感器,创新性刚柔顺应性控制技术。