人工智能时代教育的痛点是单纯知识型教学, 学习和运用知识较僵化,缺乏创新人才培养。瑞森可公司率先定义“智能协作机器人”,在制造与推广智能协作机器人Baxter和Sawyer基础上,通过引进、消化、吸收与再创新,形成了瑞森可智能协作机器人、智能移动机器人、机器人末端配件等系列产品包,并搭建瑞森可创新应用服务方案平台,为高校人工智能和机器人相关专业的科研工作提供绝佳平台。
该板块旨在分享各研究领域基于Baxter、Sawyer所做的研究成果,拓宽Baxter、Sawyer使用用户的研究思路,提供借鉴参照,加快研究工作者相关课题项目开发进程。
主要科研研究方向:运动学和运动规划、人机交互、机器学习、自动化控制、机器视觉、计算机视觉、机电一体化操作7个方面展开,为了便于复现应用,我司针对每个方向都提供了可操作性强的应用开发套件供用户选择,同时每个方向配有论文集、视频集供用户参考。
一、运动学和运动规划
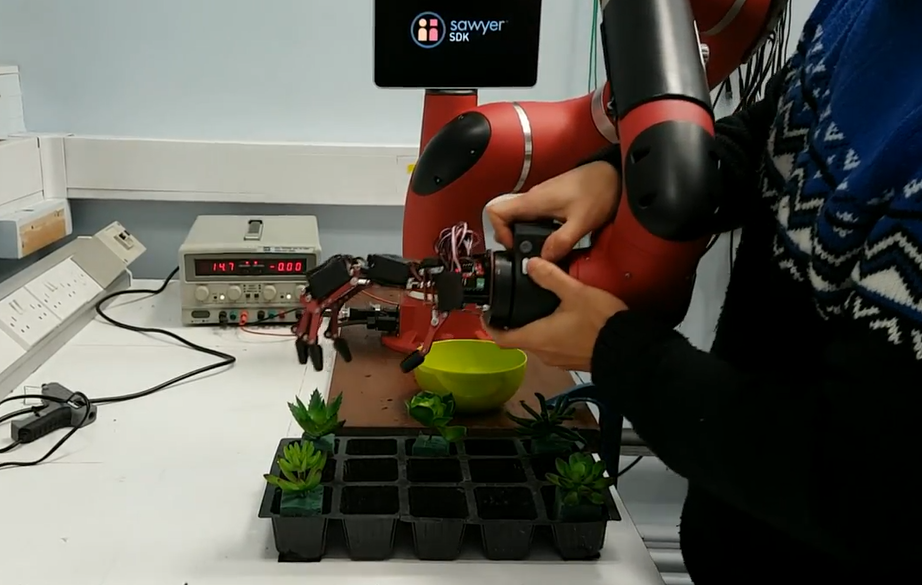
基于演示训练的机器人编程应用
重点研究的是目前协作机器人核心功能课题:机械臂拖拽编程

二、人机交互
基于语音开发平台的情感交互应用
本应用是基于Research版Baxter智能机器人,结合智能语音技术和Baxter控制算法实现语音、表情、姿态动作等人机交互。
Greet Demo 实现的功能是让Baxter能够跟人类交流并且作出相应的动作反应,例如展示一张快乐或者是悲伤的脸,与人握手,用头注视着人然后用声音来回答人提出的问题。

三、机器学习
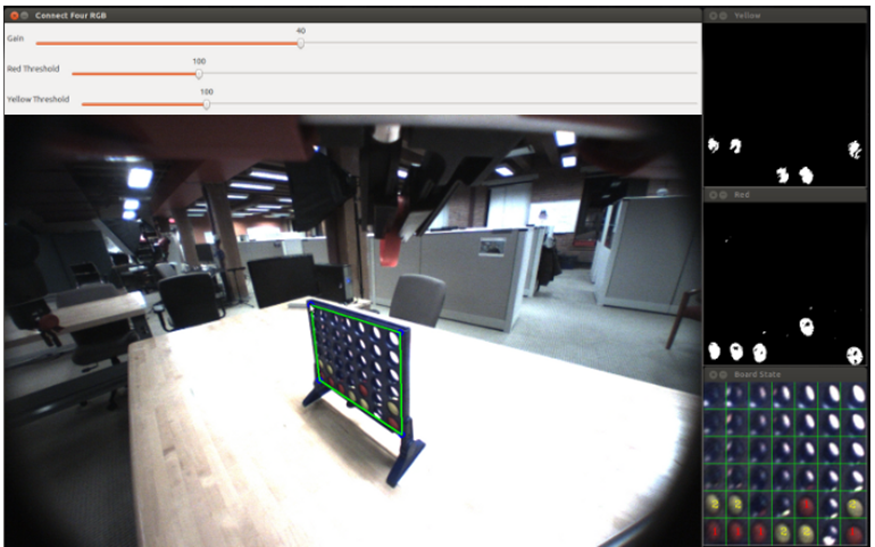
基于人工智能算法的人机博弈应用套件
本应用是基于Baxter智能双臂机器人,结合minimax算法和人工智能领域重要的视觉处理算法,并且调用了baxter本身的一些结构的SDK,比如正确开启手臂摄像头,如何记录手臂关节点位置,以及如何通过关节点位置使手臂作相应移动等,实现了人与机器人互动进行四连棋对弈,或者Baxter双臂相互对弈。

四、自动化控制
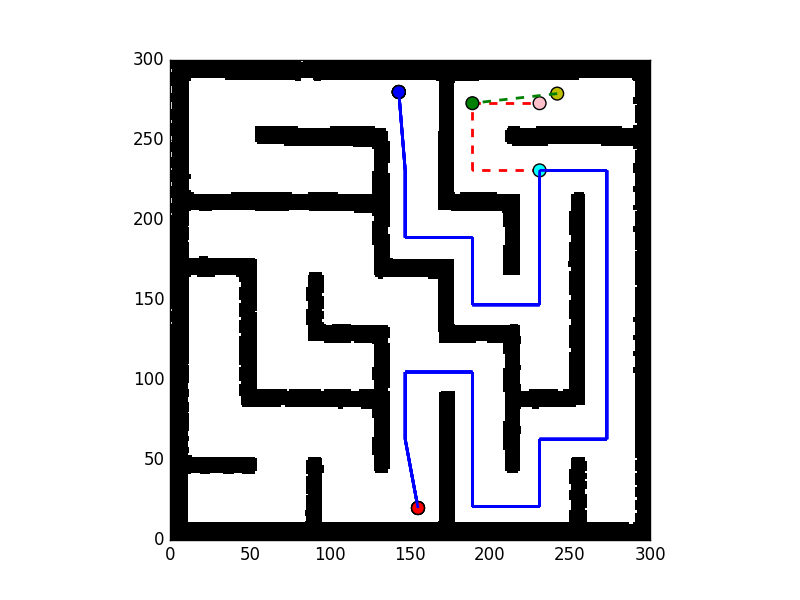
基于计算机视觉及运动控制的迷宫逃生应用套件
本应用是基于sawyer双系统柔性多关节机器人,综合了计算机视觉技术、机械臂运动控制学、机械臂电机驱控PID算法。
视觉系统自主规划迷宫球在迷宫盘内起点到终点的路径,并实时分析当前球的位置,机器人根据视觉位置信息完成机电控制,调整迷宫盘姿态,完成迷宫逃生。

基于深度视觉和智能语音技术的人机交互应用套件
本应用是基于Baxter智能双臂机器人,结合Kinect深度视觉、智能语音技术及运动控制算法等,
实现语音、表情、姿态动作等人机交互。


六、计算机视觉
基于图像分析算法的人脸识别与跟踪应用
本应用是基于Research版Sawyer智能机器人,结合人脸识别算法与头部关节控制,实现实时的人脸跟踪。
七、机电一体化操作
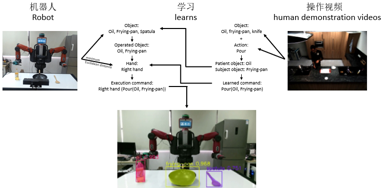
基于视觉编程系统的机器学习应用套件
本应用是Baxter智能双臂协作机器人基于视频流自动学习动作序列,结合多模传感器进行视觉、触觉等多源异
构数据的融合判断,综合产生有约束情形下的最优路径。