解密助力清华学霸获世界机器人大赛冠军的智能协作机器人Baxter
作者:本站 来源:原创 时间:2017-06-22 浏览数:10732
在2016年10月9-14日第29届国际智能机器人与系统大会(International Conference on Intelligent Robots and Systems,IROS)上,清华大学计算机系团队使用Baxter机器人获得国际机器人“抓取与操作”比赛冠军。
清华大学参赛团队合影
国际智能机器人与系统大会(IROS)由电气电子工程师学会(IEEE)和日本机器人协会(RSJ)联合创办于1988年,每年举办一次,是和机器人与自动化国际会议(IEEE International Conference on Robotics and Automation,ICRA)并列的两大顶级会议之一。会议中的“机械手抓取与操作”竞赛由美国南佛罗里达大学、杜克大学、美国国家标准与技术研究院、卡耐基梅隆大学等高校共同发起组织。本次大赛吸引了包括荷兰德尔夫特理工大学、韩国科学技术院(KAIST)、苏黎世联邦理工学院(ETH)、杜克大学和清华大学等十余家研究机构参与。
全体参赛队员合影
“机械手抓取与操作”竞赛分为手持机械手操作任务(Hand-in-Hand),其主要由志愿者手持机械手完成任务;全自主任务(Autonomous),主要由机械臂搭载机械手自主完成任务;以及仿真任务(Simulation),主要由计算机模拟完成任务。其中前两个任务又包括操作和取放任务,操作(manipulation),主要包括插拔吸管,洒盐,钉钉子,剪纸等子任务;取放(pick-and-place),主要包括抓取水果、锤子、薯片等子任务。
经过两天的激烈角逐,在重点考察自主环境感知、自主轨迹规划和自主抓取策略等方面的全自主(Autonomous)任务中,清华大学计算机系智能技术与系统国家重点实验室团队携手瑞森可智能协作机器人Baxter,利用深度学习的多模态融合物体检测与分类模块和自主规划操作策略等相关技术,在该项任务中获得冠军。

获奖证明及奖牌
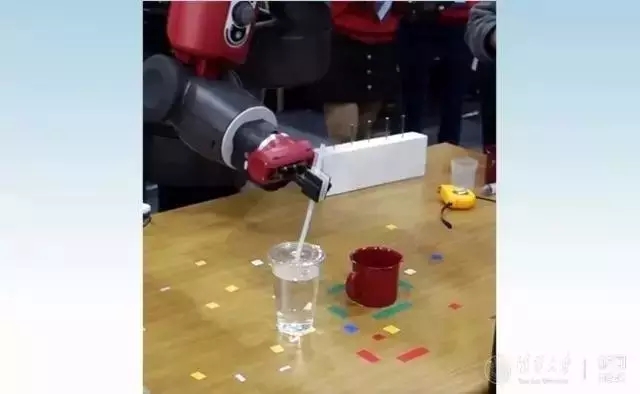
全自主操作任务比赛现场--机械手正在将吸管插入塑料水杯中
清华团队撒盐任务
清华团队自主拔USB电灯任务
解密时刻——清华学霸有话说
针对这次获奖背后的故事,小编特意走访了当时去参赛的团队教授及同学们。说起Baxter,大家脸上都充满了认可与喜爱。
“你们的瑞森可智能协作机器人Baxter可是给我们立了大功!”一位参赛的教授在采访的开头就对Baxter的优秀表现给予了高度的评价。(听到这话,小编心里比吃了一大罐蜜糖还甜,哈哈哈哈哈哈。)
下面,小编就整理了一些当时访谈的精华内容,分享给大家。
有话说一:Baxter人机协作共融做得特别好!
在清华学霸们眼中,人机协作的机器人绝对是未来机器人的发展趋势。相比以往关在围栏里的工业机器人,以Baxter为代表的智能协作机器人安全、易用且实用。这次比赛主要比的就是手持机械臂抓取和自主抓取。对于机器人抓取而言,人机协作显得尤为重要。最开始,他们测试了丹麦的一款机器人,但在接触瑞森可机器人后,果断选择用Baxter参赛,尽管只有不到一个半月的时间,但与Baxter协作得特别顺畅,最终脱颖而出,获得冠军。
有话说二:深度学习、强化学习与自主学习,Baxter的优势无与伦比!
能否实现深度学习、强化学习与自主学习,可谓是顶尖智能协作机器人与其他协作机器人、工业机器人的分水岭。在清华教授与学生眼中,Baxter具有与其他同类机器人无可比拟的学习优势。而这三种学习中,强化学习是很难的。强化学习就是指可在失败中学习,可能失败十万次,只成功一次,但这过程中的经验是可贵的。Baxter在强化学习上做得特别好,首先,它不像其他的协作机器人或者其它的刚性机械臂,遇到障碍后不会自主避让,甚至可能伤害周边的人。Baxter的手臂具有很强的柔性,碰到阻碍后会有缩回来的动作。另外,Baxter不仅允许失败,还会在失败中总结经验与教训,就像一个小孩刚开始什么都不知道,但是在示教与训练的过程中采集数据,在数据当中去学习知识。正是由于有这种超凡的学习能力,Baxter才能助力清华大学团队在比赛中力压全雄,一举夺冠。
有话说三:重点研究人机交互,我们要把知识传递给Baxter!
关于以Baxter为代表的智能协作机器人,教授和同学们都认为它们不仅能在工业应用上有巨大潜力,在服务机器人领域也具有极大的发展空间。短短几个月的相处,他们也未能完全了解Baxter的全部潜能,在未来的科研教育中,他们将继续深耕人机交互领域及人工智能的研究与开发,把知识传递给Baxter,共同促进中国智能协作机器人的发展进程!